
کوادکوپتر

کوادکوپتر یک وسیله نقلیه هوایی بدون سرنشین (UAV) یا پهپاد با چهار روتور است که هرکدام دارای یک موتور و ملخ هستند. یک کوادکوپتر می تواند به صورت دستی کنترل شود یا می تواند مستقل باشد. به آن هلیکوپتر کوادروتور یا کوادروتور نیز می گویند. این متعلق به یک کلاس عمومی تر از وسایل نقلیه هوایی به نام مولتی کوپتر یا مولتی روتور است.
ساخت کوادکوپترهای کوچک به دلیل هزینه کم، نیروی اینرسی کم و سیستم کنترل پرواز ساده آسان است. کوادکوپترها عملکرد پروازی پایداری را ارائه می دهند و آنها را برای نظارت و عکاسی هوایی ایده آل می کند. سایر زمینه های کاربردی شامل تحویل، بررسی زمین، ارزیابی محصول، پخش آب و هوا و موارد دیگر است. کوادکوپترها در اندازه های مختلفی وجود دارند، از سایز کف دست گرفته تا آنهایی که می توانند مسافر یا محموله های سنگین را حمل کنند.
استفاده غیر نظامی از کوادکوپترها تابع مقرراتی است که در بسیاری از کشورها بالغ نشده است. با این حال، کوادکوپترها بخش مهمی از حمل و نقل آینده به نام تحرک هوایی پیشرفته (AAM) هستند.
برای کسب مشاوره رایگان در خصوص تعمیرات تلویزیون ال جی می توانید با شماره 05138424040 تماس بگیرید.(نمایندگی رسمی ال جی در شهر مشهد)
اصل اصلی پرواز یک کوادکوپتر قانون سوم حرکت نیوتن است که بیان می کند که برای هر حرکتی یک واکنش برابر و مخالف وجود دارد. ملخ های کوادکوپتر هوا را به سمت پایین می راند. این باعث واکنش مخالفی به نام رانش می شود که کوادکوپتر را در برابر گرانش به سمت بالا هل می دهد. حرکت هوا از اصل برنولی، با پرههای پروانه بزرگتر و چرخش سریعتر، نیروی رانش بیشتری را ایجاد میکند.
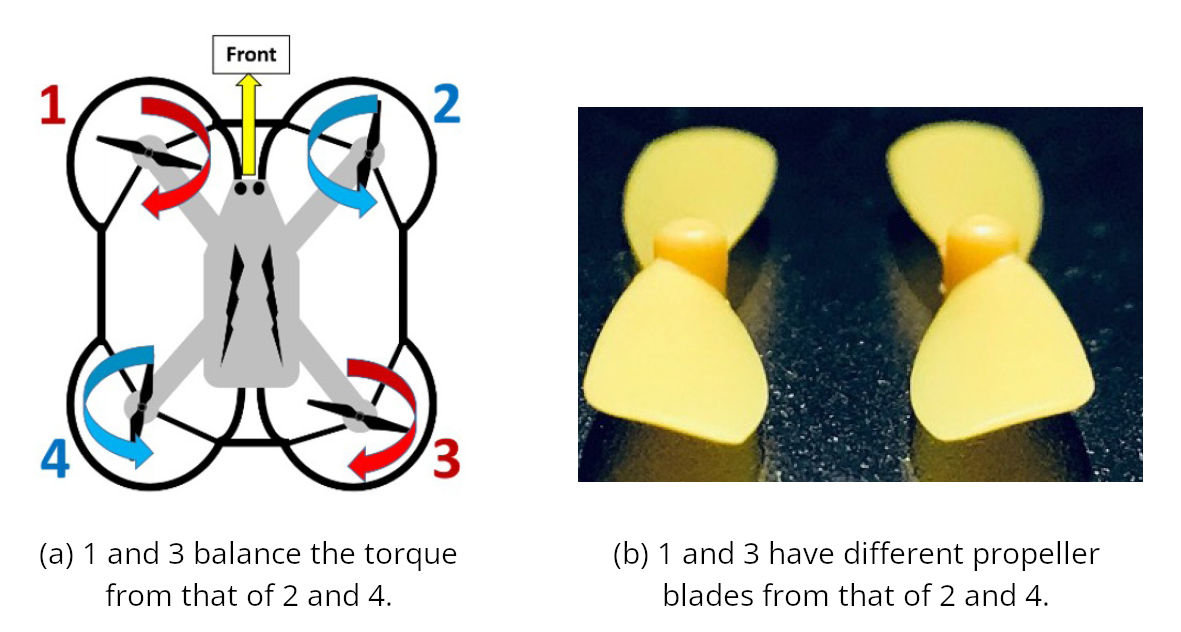
هنگامی که پروانه ها می چرخند (مثلاً در جهت عقربه های ساعت)، کوادکوپتر تمایل به چرخش در خلاف جهت عقربه های ساعت دارد. نیروی دورانی را گشتاور می گویند. هلیکوپترها با استفاده از روتور این مشکل را حل می کنند. کوادکوپترها با حرکت دادن دو ملخ مورب در جهت عقربه های ساعت و دو پروانه دیگر در خلاف جهت عقربه های ساعت، این مشکل را حل می کنند. بنابراین، گشتاور یک جفت، گشتاور دیگری را خنثی می کند.
هنگامی که هر جفت ملخ مورب در جهت مخالف بچرخد، رانش آنها در جهت مخالف خواهد بود. کوادکوپتر قادر به بلند شدن یا پرواز نخواهد بود. این مشکل با داشتن تیغه های هر جفت پروانه مورب به شکل تصویر آینه ای جفت دیگر حل می شود. به طور موثر، همه ملخ ها بدون توجه به جهت چرخش، هوا را به سمت پایین فشار می دهند.
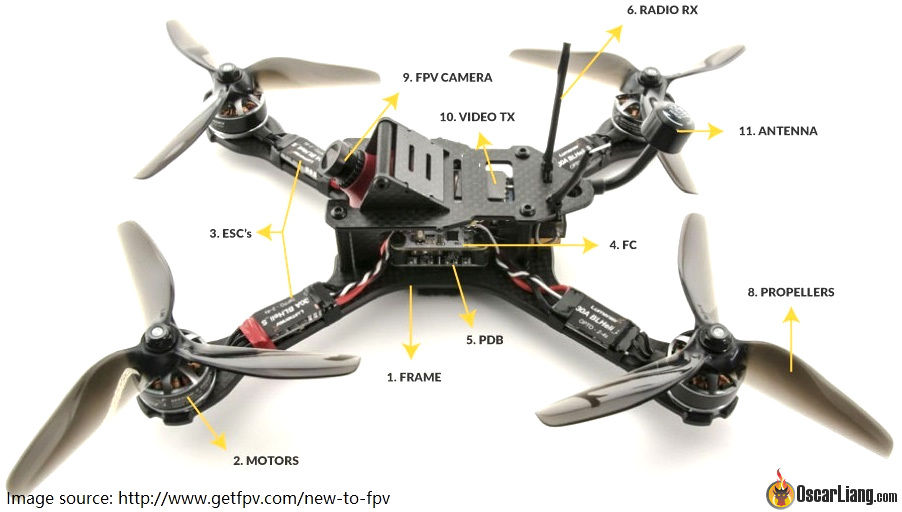
یک کوادکوپتر دارای چهار موتور است که چهار پروانه را به حرکت در می آورد. تیغه های پروانه طوری شکل می گیرند که حداکثر نیروی رانش ممکن را ایجاد کنند. اینها به انتهای یک قاب ساخته شده از آلومینیوم، فیبر کربن یا چوب بالسا متصل می شوند.
چهار کنترل کننده سرعت الکترونیکی (ESC) موتورها را به حرکت در می آورند. ESC ها معمولا در امتداد چهار بازوی کوادکوپتر قرار می گیرند. آنها موتورها را با تامین ولتاژ و جریان خاص به حرکت در می آورند. به طور معمول، یک ESC باید 1.2-1.5 برابر حداکثر جریان جریان موتور باشد.
Flight Controller (FC) را می توان "مغز" کوادکوپتر در نظر گرفت. این ESC ها به طور مستقل یا در پاسخ به دستورات از راه دور فرمان می دهد. ممکن است ورودی های بسیاری از سنسورهای روی برد را پردازش کند. برای کنترل از راه دور، کوادکوپتر مجهز به فرستنده و گیرنده بی سیم است.
نیروی به حرکت درآوردن موتورها و تمام وسایل الکترونیکی از طریق یک باتری از طریق برد توزیع برق (PDB) تامین می شود. زمان پرواز را می توان از ظرفیت باتری و حداکثر جریان گرفته شده توسط همه موتورها تخمین زد.
سایر قطعات عبارتند از کابل های جامپر، کانکتورهای گلوله، LED و زنگ. کوادکوپترها ممکن است یک گیرنده GPS، یک دوربین و بسیاری از سنسورهای دیگر بر حسب کاربردهای خاص داشته باشند.
تاریخچه و معرفی شرکت ال جی الکترونیکس |شرکت ال جی را بشناسید
آنتن | گیرنده رادیویی|فرکانس مختلف
چگونه یک کوادکوپتر به حرکات مختلف دست می یابد؟
یک کوادکوپتر چهار حرکت مختلف دارد:
عمودی: کوادکوپتر می تواند بر خلاف گرانش به سمت بالا حرکت کند یا به صورت کنترل شده پایین بیاید. به این حرکات دریچه گاز می گویند.
چرخشی: چرخش در جهت عقربه های ساعت یا خلاف جهت عقربه های ساعت حول محور عمودی را انحراف می گویند.
جانبی از جلو به عقب: کج شدن در امتداد محور جانبی که pitch نامیده می شود، باعث شیب یا بالا رفتن دماغه کوادکوپتر می شود. این به نوبه خود حرکت رو به جلو یا عقب را امکان پذیر می کند.
چپ به راست جانبی: کج شدن در امتداد این محور که رول نامیده می شود، حرکت به سمت چپ یا راست را امکان پذیر می کند.
موارد فوق نشان می دهد که یک کوادکوپتر دارای شش درجه آزادی است: حرکات خطی در امتداد جهات x، y و z. حرکات چرخشی به نام انحراف، زمین و رول.
حرکات با کنترل سرعت چرخش چهار موتور به دست می آید. این در شکل نشان داده شده است. به عنوان مثال، با پیچ، هنگامی که ملخ های عقبی سریعتر از پروانه های جلو می چرخند، دماغه پایین می آید و کوادکوپتر به سمت جلو حرکت می کند. با انحراف، زمانی که دو پروانه در جهت عقربه های ساعت سریعتر از دو ملخ دیگر بچرخند، کوادکوپتر در خلاف جهت عقربه های ساعت می چرخد.
پیشنهاد میکنم که مقالات زیر را مطالعه کنید :
🍂🍂Samsung Galaxy Z Fold 4 گوشی سامسونگ
🍂🍂شرکت سونی را بهتر بشناسیم.
🍂🍂آموزش گام به گام تعمیرات تلویزیون

انواع کوادکوپتر بر اساس شکل آنها به شرح زیر است:
کوادکوپتر X: یک طرح محبوب، برای عکاسی هوایی، فیلمبرداری، مسابقه نمایش اول شخص (FPV) و بدلکاری آکروباتیک استفاده می شود. تغییرات فریم شامل X واقعی، مربع، هیبریدی X و X کشیده است.
کوادکوپتر X-Stretched: که به آن پیکربندی V نیز می گویند، طراحی کشیده آن پایداری بیشتری را در محور زمین فراهم می کند.
کوادکوپتر H: دارای فریم H شکل.
کوادکوپتر: هنگام حرکت مستقیم به خوبی ردیابی می کند. برای حرکت مستقیم یا جانبی، یک موتور سریعتر از دیگری در بازوی مقابل حرکت می کند. پروانه ها از نظر آیرودینامیکی کارآمد هستند. این در پروازهای آکروباتیک و شیرین کاری FPV استفاده می شود.
کوادکوپتر Y4: فریم مانند یک تری کوپتر دارای سه بازو است اما بازوی عقب دارای دو موتور است که به صورت کواکسیال برای کنترل بهتر انحراف نصب شده اند. در حالی که یک تریکوپتر از موتورهای سروو استفاده می کند، Y4 از موتورهای BLDC استفاده می کند. از این رو Y4 قدرت بالابری بیشتری دارد و دوام بیشتری دارد.
کوادکوپتر V-tail یا A-Tail: شبیه به Y4 اما با موتورهای عقب که با زاویه به شکل V یا A نصب شده اند. کنترل انحراف بیشتری دارد زیرا از تراست برای چرخش استفاده می کند تا گشتاور ضد.
کاربردهای کوادکوپتر چیست؟
ما به کاربردهای زیر کوادکوپترها اشاره می کنیم:
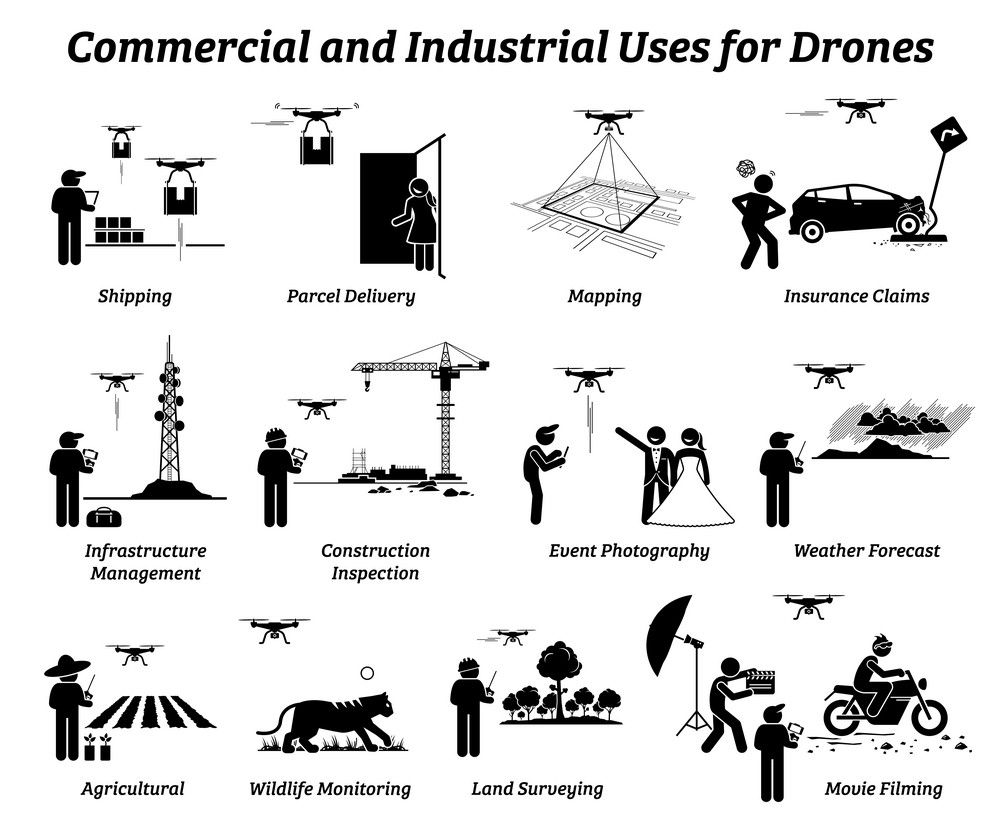
عکاسی هوایی: در فیلمبرداری سکانس های اکشن و سناریوهای علمی تخیلی استفاده می شود که فیلمبرداری را بسیار ساده تر می کند.
حمل و نقل و تحویل: تحویل هواپیماهای بدون سرنشین توسط شرکت های بزرگی از جمله آمازون، UPS و DHL پشتیبانی می شود. برای حمل بسته های کوچک، مواد غذایی، داروها و سایر اقلام در فواصل کوتاه استفاده می شود.
نقشه برداری جغرافیایی: در مکان های صعب العبور مانند سواحل، قله کوه ها و جزایر، کوادکوپترها می توانند داده هایی با وضوح بسیار بالا جمع آوری کرده و تصاویر را دانلود کنند.
مدیریت بلایا: پس از یک فاجعه طبیعی یا مصنوعی، کوادکوپترها می توانند به سرعت با زباله ها مذاکره کنند و در جستجوی بیماران مجروح اطلاعات جمع آوری کنند.
کشاورزی دقیق: سنسورهای مادون قرمز کوادکوپترها ممکن است برای ارزیابی سلامت محصولات کالیبره شوند و به کشاورزان این امکان را میدهند که واکنش نشان دهند و شرایط کشاورزی را به صورت محلی با کودها یا آفتکشها بهبود بخشند.
پیش بینی آب و هوا: کوادکوپترها برای ردیابی آب و هوای خطرناک و غیرقابل پیش بینی در حال تغییر هستند. آنها را می توان به طور مقرون به صرفه در طوفان ها و گردبادها مستقر کرد.
نظارت بر حیات وحش: فیلها، کرگدنها و گربههای بزرگ با استفاده از کوادکوپتر عکاسی شدند. پهپادها به لطف دوربین ها و سنسورهای مادون قرمز خود می توانند در شب کار کنند.
سرگرمی: در مبارزات و مسابقات در قفس، از کوادکوپترها برای جمع آوری تصاویر و ضبط ها استفاده می شود.
ملاحظات طراحی کوادکوپتر چیست؟
ماهیت طراحی کوادکوپتر ایجاد نیروی رانش کافی برای حمل بار است. بارگذاری به برنامه بستگی دارد. رانش با طراحی پروانه خوب ارائه می شود. تیغههای آنها به گونهای است که نیروی کشش را به حداقل برساند و نیروی رانش را به حداکثر برساند. هر روتور در مرکز چرخش خود نیروی رانش و گشتاور تولید می کند. جاذبه وجود دارد همچنین کشیدن در جهت مخالف پرواز وجود دارد. اینها نیروهای اصلی هستند که در طول طراحی باید در نظر گرفته شوند.
ثبات و کنترل خوب پرواز ضروری است. ایمنی و دوام مهم است.
موتورهای DC بدون جاروبک (BLDC) معمولاً برای کوادکوپترها استفاده می شوند. اینها از یک آهنربای دائمی تشکیل شده اند که به دور یک آرمیچر ثابت می چرخد. در مقایسه با موتورهای DC برس دار، گشتاور بیشتری به ازای هر وزن، کاهش نویز، افزایش قابلیت اطمینان، طول عمر بیشتر و افزایش کارایی دریافت می کنیم.
برای کنترل از راه دور/رادیویی (RC)، باید فناوری بی سیم صحیح را انتخاب کنیم. این محدوده ارتباط و کنترل را تعیین می کند.
برای برق، باتری های لیتیوم پلیمر (LiPO) و لیتیوم پلیمر ولتاژ بالا (LiHV) معمولا برای کوادکوپتر استفاده می شود. آنها باید برای نصب منظم در داخل قاب شکل داده شوند. ظرفیت باتری تعیین کننده زمان پرواز است. ظرفیت بالاتر به طور کلی به معنای باتری های سنگین تر است و از این رو یک معاوضه وجود دارد.
برد و استقامت کوادکوپتر چیست؟
استقامت به عنوان کل زمان ماندن کوادکوپتر در هوا با مخزن پر سوخت تعریف می شود. برای یک کوادکوپتر، باتری سوخت است. 2 ساعت و 31 دقیقه و 30 ثانیه طولانی ترین استقامتی است که یک کوادکوپتر به دست آورده است. این رکورد توسط فردیناند کیکینگر آلمانی در سال 2016 ایجاد شد. در آن از باتری های لیتیوم یونی با میزان دشارژ کم و ظرفیت بالا استفاده شد. او وزن غیرضروری را از بدنه هواپیما جدا کرد تا توان مصرفی را کاهش دهد و استقامت را افزایش دهد. برای محاسبه استقامت در دقیقه، ظرفیت باتری را بر حسب آمپر ساعت در نظر بگیرید. آن را به جریان متوسط تقسیم کنید و سپس آن را در 60 ضرب کنید.
برد به عنوان مسافت طی شده توسط یک وسیله نقلیه هوایی در یک مخزن پر سوخت تعریف می شود. یک پهپاد پرمصرف می تواند پهپادی در حدود 2.5-4.5 مایل (4-8 کیلومتر) داشته باشد. پهپادهای مصرفی سطح متوسط بردی در حدود 0.25-1.5 مایل (0.4-3 کیلومتر) دارند. DJI Mavic 2 Pro طولانی ترین پهپاد است.
چه نوع سیستم کنترلی در کوادکوپتر استفاده می شود؟
کوادکوپترها به نرم افزار و عناصر سخت افزاری کنترل پرواز نیاز دارند. اینها امکان کنترل از راه دور را فراهم می کند. این کار یا توسط یک خلبان انجام می شود یا به طور مستقل توسط یک رایانه داخلی. دینامیک پرواز بسیار متغیر و غیر خطی است. حفظ نگرش و ثبات ممکن است مستلزم محاسبه مداوم و تنظیم مجدد سیستم های پرواز هواپیما باشد.
عناصر روی زمین یک سیستم کنترل زمینی (GCS) را تشکیل می دهند و از یک مودم و پیوند داده برای ارتباط استفاده می کنند. کوادکوپتر اطلاعات را از یک سیستم داده هوا (فشار استاتیک و دینامیک)، گیرنده GNSS یا سیستم مرجع نگرش و عنوانAHRS(دادههای رول، پیچ و تاب و انحراف) جمعآوری میکند. یک رایانه کنترل پرواز (FCC) از این داده ها برای هدایت کوادکوپتر به ایستگاه بعدی استفاده می کند. FCC همچنین محموله ها را اداره می کند و با GCS ارتباط برقرار می کند.
MATLAB/Simulink ابزارهایی برای انجام شبیه سازی، نحوه عملکرد کوادکوپتر هستند. این سه کنترلر عبارتند از: خطی سازی بازخورد با کنترلر PD (FBL+PD)، خطی سازی بازخورد با LQR (FBL+LQR) و کنترلر PID به عنوان مدل های مجزای سیمولینک پیاده سازی و شبیه سازی شده اند.
نقاط عطف
اولین هواپیمای بدون خلبان پس از شروع جنگ جهانی اول ساخته شد. این هواپیما به نام Ruston Proctor Aerial Target نامگذاری شد. این یک هواپیمای بدون خلبان با رادیو کنترل است که بر اساس فناوری RC مخترع نیکولا تسلا ساخته شده است. هدف از Aerial Target این است که به عنوان یک بمب پرنده عمل کند که می تواند به سمت دشمنان هدایت شود.
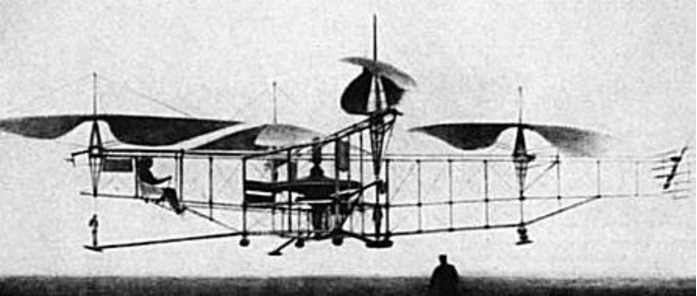
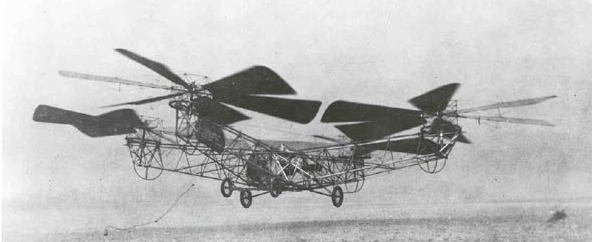
کوادکوپترها توسط مهندسان برای حل مشکلات خلبانان هلیکوپتر با انجام پروازهای عمودی ساخته شده اند. اولین مورد با Omnichen 2 توسط Etienne Omnichen نامگذاری شده است.
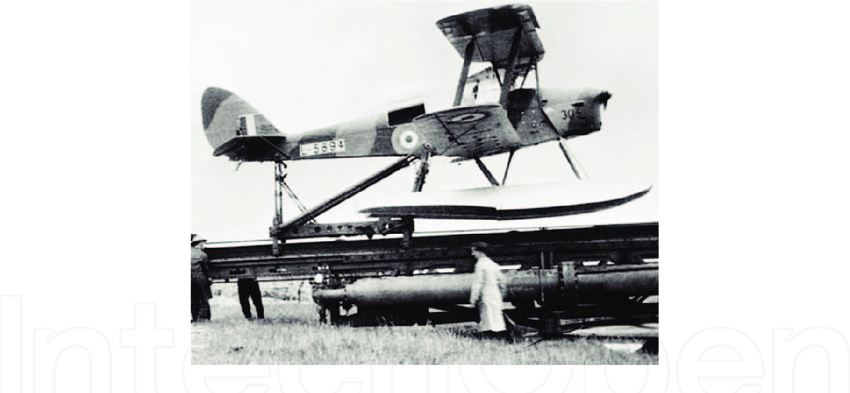
بریتانیایی ها "Queen Bee" یک پهپاد هدف رادیویی برای هواپیماهای بدون سرنشین رادیویی را توسعه دادند.
نیروی دریایی ایالات متحده آزمایش با هواپیماهای رادیویی را آغاز کرد. این منجر به توسعه پهپاد Curtiss N2C-2 می شود.
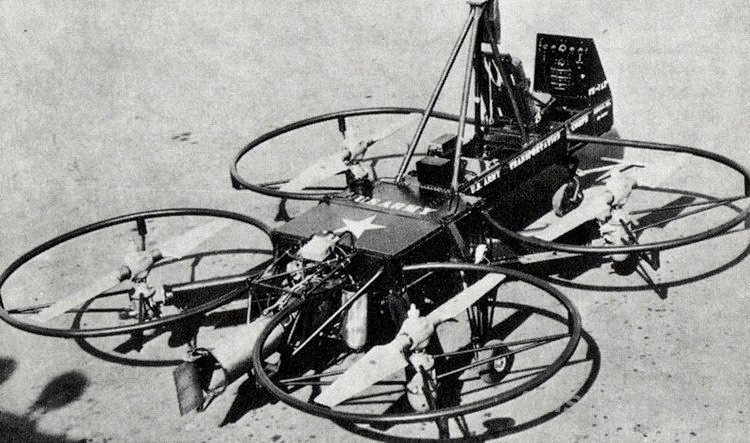
VZ7 یک هلیکوپتر کوادروتور VTOL است که توسط شرکت Curtiss-Wright برای ارتش ایالات متحده طراحی شده است. این یک "جیپ پرنده" است.
1981
پهپاد اسرائیلی IAI Scout در ماموریت های رزمی توسط نیروی دفاعی آفریقای جنوبی علیه آنگولا در طول عملیات Protea مورد استفاده قرار می گیرد.
1999
Bell Boeing Quad Tiltrotor یک کوادکوپتر ثابت است که با مفهوم روتور شیب برای حمل و نقل نظامی سایز C-130 ترکیب شده است.
2013
آمازون استفاده از فناوری پهپادهای تجاری را در سیستم تحویل پیشنهاد می کند.
2018
ایرباس در حال توسعه یک کوادکوپتر با باتری است تا به عنوان یک تاکسی هوایی شهری عمل کند، در ابتدا بدون خلبان، اما به طور بالقوه در آینده مستقل خواهد بود.
2021
یک سسنا 172 شرکت کانادایی فلایرز بینالمللی که بهعنوان C-GKWL ثبت شده است، در حین نزدیک شدن به فرودگاه شهرداری باتونویل با پهپادی که توسط پلیس منطقهای یورک اداره میشود، برخورد میکند.